ラズパイでリモコンの赤外線を受信する

目次
ラズパイを使って外出先からエアコンを操作したい。まずはエアコンのリモコンから出ている赤外線を知る必要がある。
赤外線の受信モジュールを使ってリモコンから出ている信号を調べよう。
▼ラズパイでエアコンを操作したい記事全容
前提知識
さあやるぞ、と意気込んだはいいものの電子工作に関してなんの知識もない。
ブレッドボードやら赤外線の受信モジュールやら抵抗やらは2,000円程度で調達できたので、壊してしまうくらいイジれるのだがラズパイがお釈迦になってしまうのはやや困る。
という訳で地道に知識を積み上げていくことにする。
トライアルアンドエラーで突き進んでいく、が僕のモットーである。動作した内容を記載しているが、内容に関しては一切の責任を負わないので、ラズパイの回線がショートしても文句は言わないでほしい。
▼ラズパイのGPIOを調べる ラズパイの40本あるGPIOのピンの役割についてざっと習得。
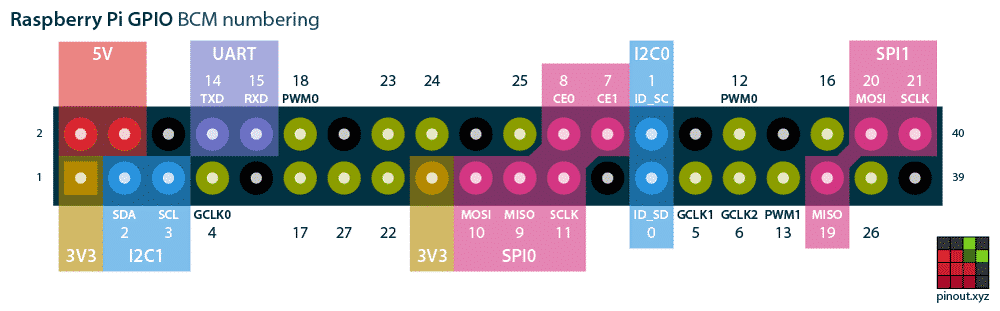
▼pinoutコマンドの出力結果、()内の数字は物理番号
3V3 (1) (2) 5V
GPIO2 (3) (4) 5V
GPIO3 (5) (6) GND
GPIO4 (7) (8) GPIO14
GND (9) (10) GPIO15
GPIO17 (11) (12) GPIO18
GPIO27 (13) (14) GND
GPIO22 (15) (16) GPIO23
3V3 (17) (18) GPIO24
GPIO10 (19) (20) GND
GPIO9 (21) (22) GPIO25
GPIO11 (23) (24) GPIO8
GND (25) (26) GPIO7
GPIO0 (27) (28) GPIO1
GPIO5 (29) (30) GND
GPIO6 (31) (32) GPIO12
GPIO13 (33) (34) GND
GPIO19 (35) (36) GPIO16
GPIO26 (37) (38) GPIO20
GND (39) (40) GPIO21
配線
赤外線の受信は非常に簡単で、赤外線リモコン受信モジュールをラズパイに繋ぐだけである。
▼赤外線リモコン受信モジュール
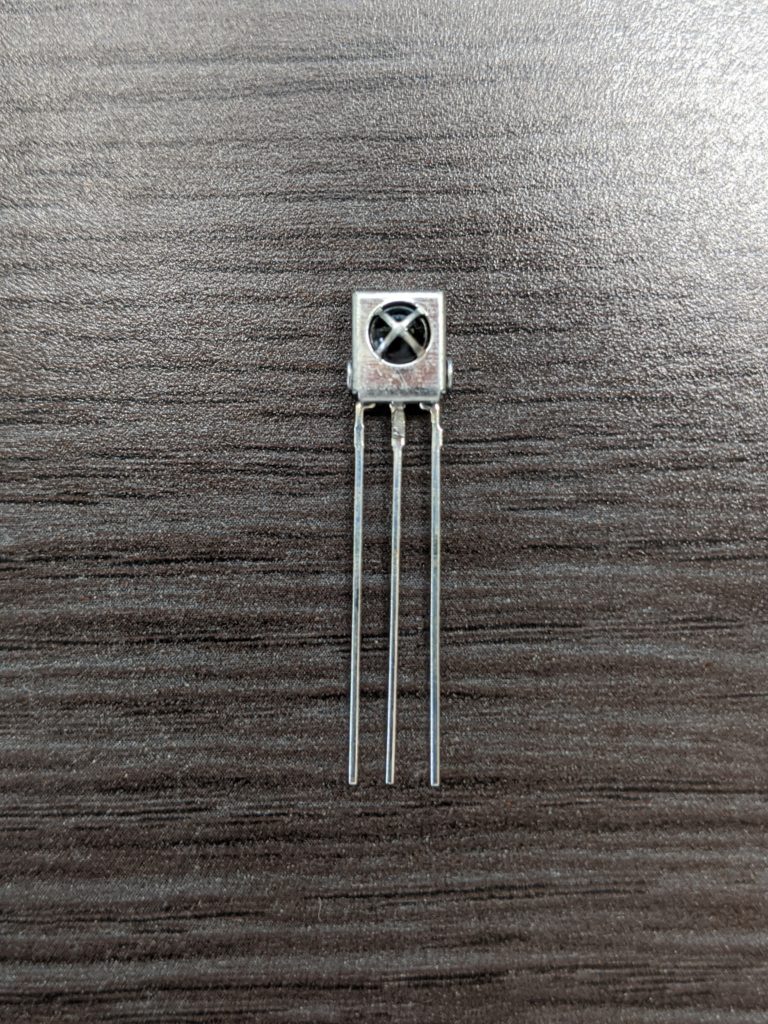
▼3本の脚の説明
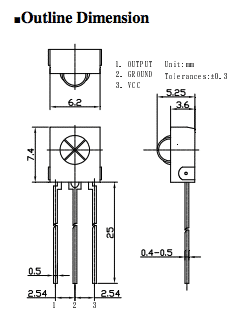
http://akizukidenshi.com/download/OSRB38C9AA.pdf
3本でている脚は左から順番にOUTPUT, GRAUND, VCCらしい。VCCはどうもVoltage Collectorの略であり、この端子は通常電源に接続する。
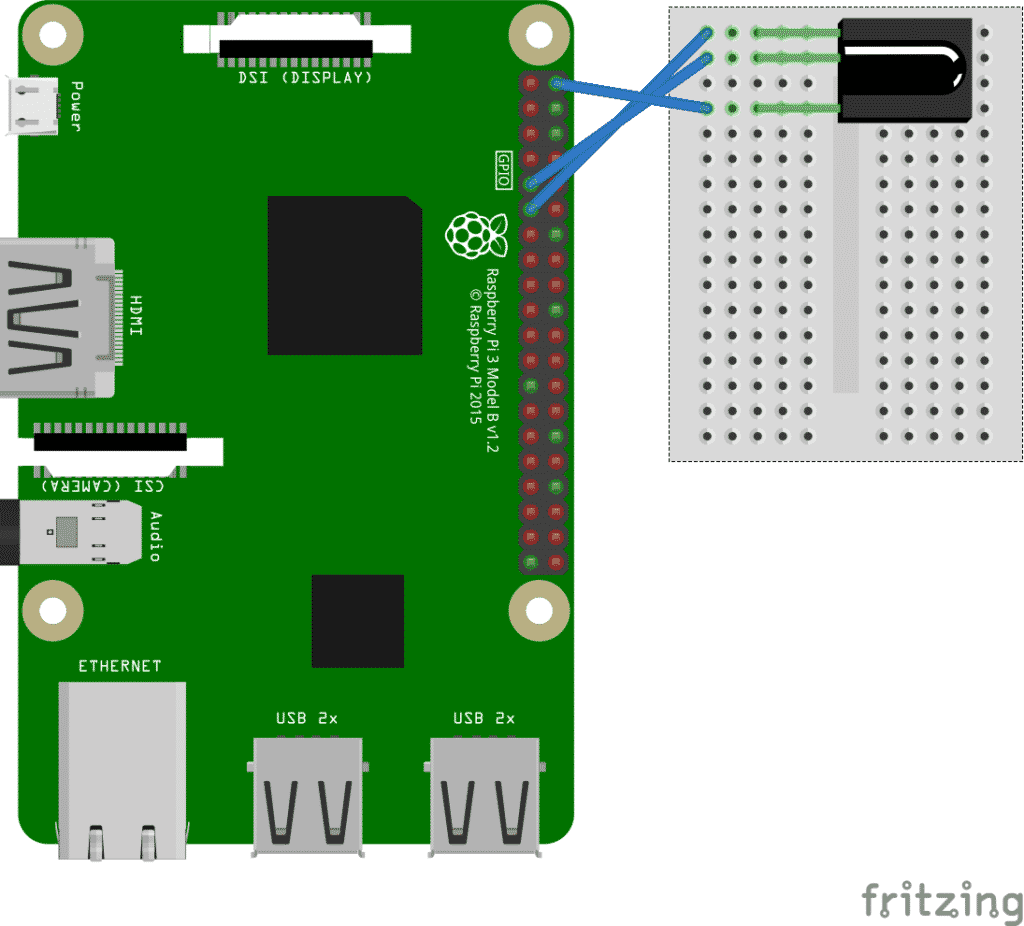
OUTPUTをGPIO17(物理番号11)にGRAUNDをその隣のGND(9)にVCCは5V(2)に接続する。
▼配線図 raspberry pi 3になっているのはご愛嬌。あと、いい赤外線受信モジュールの図がなかったのでブレッドボードの上から4列目にピンを刺しているように見えるが、上から3列連続で刺しているものと読み替えていただきたい。
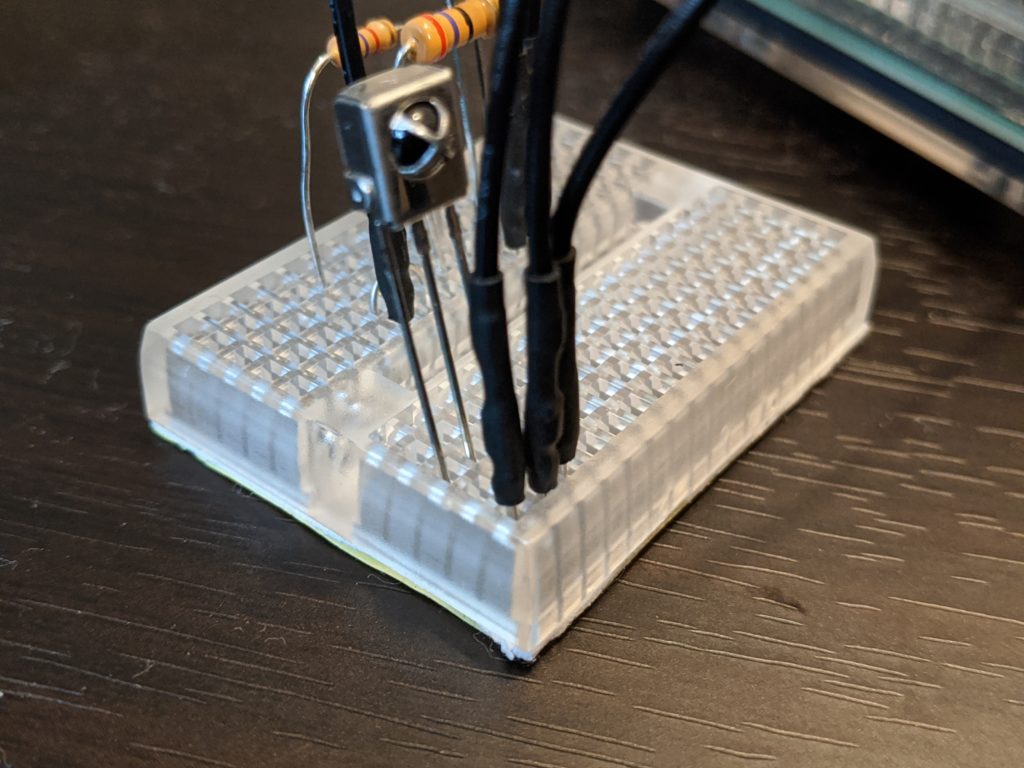
▼写真で見るとこんな感じ
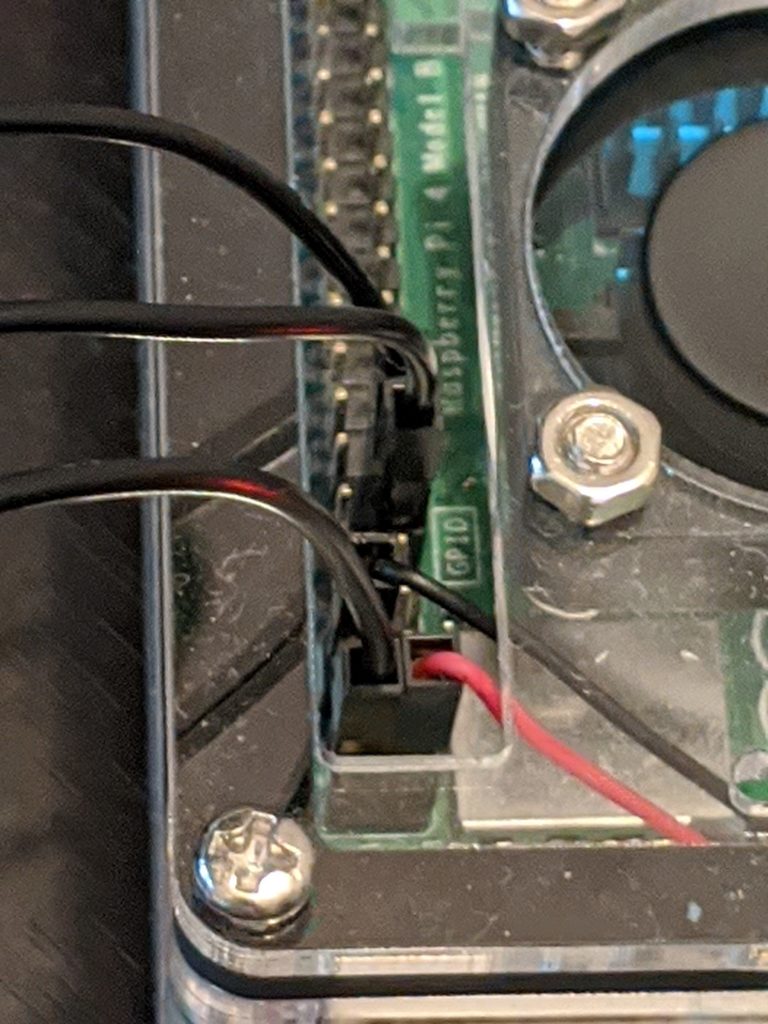
▼ラズパイ側はこんな感じ。冷却ファンのコードも刺さっている。
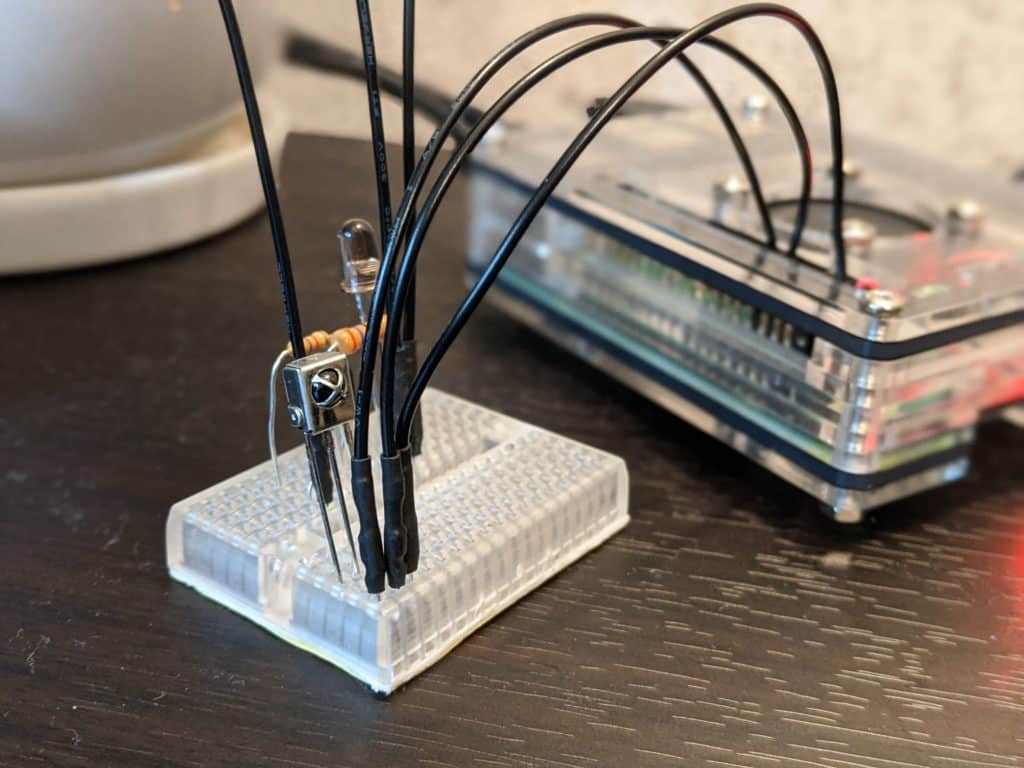
▼全体。ブレッドボードに抵抗なども刺しているがここでは関係ない。
なんて簡単なんだろうか。小学生の夏休みの自由工作よりも簡単である。
赤外線受信実行
ハード面の準備ができたので、ソフト面を用意していこう。
pigpioのインストール
pi@raspberrypi:/ $ sudo apt-get update
pi@raspberrypi:/ $ sudo apt-get upgrade
pi@raspberrypi:/ $ sudo apt-get install pigpio python3-pigpio
インストールができたら、systemctlのコマンドでラズパイの電源が入った際に起動するように登録し、pigpioを起動させます。
pi@raspberrypi:/ $ sudo systemctl enable pigpiod.service
pi@raspberrypi:/ $ sudo systemctl start pigpiod
起動ができたら、ステータスの確認を行う。
pi@raspberrypi:~ $ sudo systemctl status pigpiod
● pigpiod.service - Daemon required to control GPIO pins via pigpio
Loaded: loaded (/lib/systemd/system/pigpiod.service; enabled; vendor preset: enabled)
Active: active (running)
active: active(running)になっていればヨシ!
GPIOの設定
さっきOUTPUTを突き刺したGPIO17(物理番号11)をinput(r)でpull up(u)に設定する。※ラズパイ側から見ればinputだ。
pi@raspberrypi:~ $ echo 'm 17 r pud 17 u' > /dev/pigpio
赤外線送受信のスクリプトのダウンロード
IR Record and Playback(http://abyz.me.uk/rpi/pigpio/examples.html#Python_irrp_py)をダウンロードする。
▼wgetでzipをダウンロードし、unzipでzipを解凍する。
pi@raspberrypi:/ $ sudo wget http://abyz.me.uk/rpi/pigpio/code/irrp_py.zip -O ダウンロード/irrp.zip
pi@raspberrypi:/ $ sudo unzip -d ダウンロード/irrp ダウンロード/irrp.zip
zipファイルが解凍できたら、pythonファイルが入っている。中身を確認する。
pi@raspberrypi:/ $ cat ダウンロード/irrp/irrp.py
#!/usr/bin/env python
# irrp.py
# 2015-12-21
# Public Domain
"""
A utility to record and then playback IR remote control codes.
To record use
./irrp.py -r -g4 -fcodes 1 2 3 4 5 6
where
-r record
-g the GPIO connected to the IR receiver
-f the file to store the codes
and 1 2 3 4 5 6 is a list of codes to record.
To playback use
./irrp.py -p -g17 -fcodes 2 3 4
where
-p playback
-g the GPIO connected to the IR transmitter
-f the file storing the codes to transmit
and 2 3 4 is a list of codes to transmit.
OPTIONS
-r record
-p playback
-g GPIO (receiver for record, transmitter for playback)
-f file
id1 id2 id3 list of ids to record or transmit
RECORD
--glitch ignore edges shorter than glitch microseconds, default 100 us
--post expect post milliseconds of silence after code, default 15 ms
--pre expect pre milliseconds of silence before code, default 200 ms
--short reject codes with less than short pulses, default 10
--tolerance consider pulses the same if within tolerance percent, default 15
--no-confirm don't require a code to be repeated during record
TRANSMIT
--freq IR carrier frequency, default 38 kHz
--gap gap in milliseconds between transmitted codes, default 100 ms
"""
import time
import json
import os
import argparse
import pigpio # http://abyz.co.uk/rpi/pigpio/python.html
p = argparse.ArgumentParser()
g = p.add_mutually_exclusive_group(required=True)
g.add_argument("-p", "--play", help="play keys", action="store_true")
g.add_argument("-r", "--record", help="record keys", action="store_true")
p.add_argument("-g", "--gpio", help="GPIO for RX/TX", required=True, type=int)
p.add_argument("-f", "--file", help="Filename", required=True)
p.add_argument('id', nargs='+', type=str, help='IR codes')
p.add_argument("--freq", help="frequency kHz", type=float, default=38.0)
p.add_argument("--gap", help="key gap ms", type=int, default=100)
p.add_argument("--glitch", help="glitch us", type=int, default=100)
p.add_argument("--post", help="postamble ms", type=int, default=15)
p.add_argument("--pre", help="preamble ms", type=int, default=200)
p.add_argument("--short", help="short code length", type=int, default=10)
p.add_argument("--tolerance", help="tolerance percent", type=int, default=15)
p.add_argument("-v", "--verbose", help="Be verbose", action="store_true")
p.add_argument("--no-confirm", help="No confirm needed", action="store_true")
args = p.parse_args()
GPIO = args.gpio
FILE = args.file
GLITCH = args.glitch
PRE_MS = args.pre
POST_MS = args.post
FREQ = args.freq
VERBOSE = args.verbose
SHORT = args.short
GAP_MS = args.gap
NO_CONFIRM = args.no_confirm
TOLERANCE = args.tolerance
POST_US = POST_MS * 1000
PRE_US = PRE_MS * 1000
GAP_S = GAP_MS / 1000.0
CONFIRM = not NO_CONFIRM
TOLER_MIN = (100 - TOLERANCE) / 100.0
TOLER_MAX = (100 + TOLERANCE) / 100.0
last_tick = 0
in_code = False
code = []
fetching_code = False
def backup(f):
"""
f -> f.bak -> f.bak1 -> f.bak2
"""
try:
os.rename(os.path.realpath(f)+".bak1", os.path.realpath(f)+".bak2")
except:
pass
try:
os.rename(os.path.realpath(f)+".bak", os.path.realpath(f)+".bak1")
except:
pass
try:
os.rename(os.path.realpath(f), os.path.realpath(f)+".bak")
except:
pass
def carrier(gpio, frequency, micros):
"""
Generate carrier square wave.
"""
wf = []
cycle = 1000.0 / frequency
cycles = int(round(micros/cycle))
on = int(round(cycle / 2.0))
sofar = 0
for c in range(cycles):
target = int(round((c+1)*cycle))
sofar += on
off = target - sofar
sofar += off
wf.append(pigpio.pulse(1< TOLER_MAX):
return False
for i in range(len(p1)):
p1[i] = int(round((p1[i]+p2[i])/2.0))
if VERBOSE:
print("after compare", p1)
return True
def tidy_mark_space(records, base):
ms = {}
# Find all the unique marks (base=0) or spaces (base=1)
# and count the number of times they appear,
for rec in records:
rl = len(records[rec])
for i in range(base, rl, 2):
if records[rec][i] in ms:
ms[records[rec][i]] += 1
else:
ms[records[rec][i]] = 1
if VERBOSE:
print("t_m_s A", ms)
v = None
for plen in sorted(ms):
# Now go through in order, shortest first, and collapse
# pulses which are the same within a tolerance to the
# same value. The value is the weighted average of the
# occurences.
#
# E.g. 500x20 550x30 600x30 1000x10 1100x10 1700x5 1750x5
#
# becomes 556(x80) 1050(x20) 1725(x10)
#
if v == None:
e = [plen]
v = plen
tot = plen * ms[plen]
similar = ms[plen]
elif plen < (v*TOLER_MAX):
e.append(plen)
tot += (plen * ms[plen])
similar += ms[plen]
else:
v = int(round(tot/float(similar)))
# set all previous to v
for i in e:
ms[i] = v
e = [plen]
v = plen
tot = plen * ms[plen]
similar = ms[plen]
v = int(round(tot/float(similar)))
# set all previous to v
for i in e:
ms[i] = v
if VERBOSE:
print("t_m_s B", ms)
for rec in records:
rl = len(records[rec])
for i in range(base, rl, 2):
records[rec][i] = ms[records[rec][i]]
def tidy(records):
tidy_mark_space(records, 0) # Marks.
tidy_mark_space(records, 1) # Spaces.
def end_of_code():
global code, fetching_code
if len(code) > SHORT:
normalise(code)
fetching_code = False
else:
code = []
print("Short code, probably a repeat, try again")
def cbf(gpio, level, tick):
global last_tick, in_code, code, fetching_code
if level != pigpio.TIMEOUT:
edge = pigpio.tickDiff(last_tick, tick)
last_tick = tick
if fetching_code:
if (edge > PRE_US) and (not in_code): # Start of a code.
in_code = True
pi.set_watchdog(GPIO, POST_MS) # Start watchdog.
elif (edge > POST_US) and in_code: # End of a code.
in_code = False
pi.set_watchdog(GPIO, 0) # Cancel watchdog.
end_of_code()
elif in_code:
code.append(edge)
else:
pi.set_watchdog(GPIO, 0) # Cancel watchdog.
if in_code:
in_code = False
end_of_code()
pi = pigpio.pi() # Connect to Pi.
if not pi.connected:
exit(0)
if args.record: # Record.
try:
f = open(FILE, "r")
records = json.load(f)
f.close()
except:
records = {}
pi.set_mode(GPIO, pigpio.INPUT) # IR RX connected to this GPIO.
pi.set_glitch_filter(GPIO, GLITCH) # Ignore glitches.
cb = pi.callback(GPIO, pigpio.EITHER_EDGE, cbf)
# Process each id
print("Recording")
for arg in args.id:
print("Press key for '{}'".format(arg))
code = []
fetching_code = True
while fetching_code:
time.sleep(0.1)
print("Okay")
time.sleep(0.5)
if CONFIRM:
press_1 = code[:]
done = False
tries = 0
while not done:
print("Press key for '{}' to confirm".format(arg))
code = []
fetching_code = True
while fetching_code:
time.sleep(0.1)
press_2 = code[:]
the_same = compare(press_1, press_2)
if the_same:
done = True
records[arg] = press_1[:]
print("Okay")
time.sleep(0.5)
else:
tries += 1
if tries <= 3:
print("No match")
else:
print("Giving up on key '{}'".format(arg))
done = True
time.sleep(0.5)
else: # No confirm.
records[arg] = code[:]
pi.set_glitch_filter(GPIO, 0) # Cancel glitch filter.
pi.set_watchdog(GPIO, 0) # Cancel watchdog.
tidy(records)
backup(FILE)
f = open(FILE, "w")
f.write(json.dumps(records, sort_keys=True).replace("],", "],\n")+"\n")
f.close()
else: # Playback.
try:
f = open(FILE, "r")
except:
print("Can't open: {}".format(FILE))
exit(0)
records = json.load(f)
f.close()
pi.set_mode(GPIO, pigpio.OUTPUT) # IR TX connected to this GPIO.
pi.wave_add_new()
emit_time = time.time()
if VERBOSE:
print("Playing")
for arg in args.id:
if arg in records:
code = records[arg]
# Create wave
marks_wid = {}
spaces_wid = {}
wave = [0]*len(code)
for i in range(0, len(code)):
ci = code[i]
if i & 1: # Space
if ci not in spaces_wid:
pi.wave_add_generic([pigpio.pulse(0, 0, ci)])
spaces_wid[ci] = pi.wave_create()
wave[i] = spaces_wid[ci]
else: # Mark
if ci not in marks_wid:
wf = carrier(GPIO, FREQ, ci)
pi.wave_add_generic(wf)
marks_wid[ci] = pi.wave_create()
wave[i] = marks_wid[ci]
delay = emit_time - time.time()
if delay > 0.0:
time.sleep(delay)
pi.wave_chain(wave)
if VERBOSE:
print("key " + arg)
while pi.wave_tx_busy():
time.sleep(0.002)
emit_time = time.time() + GAP_S
for i in marks_wid:
pi.wave_delete(marks_wid[i])
marks_wid = {}
for i in spaces_wid:
pi.wave_delete(spaces_wid[i])
spaces_wid = {}
else:
print("Id {} not found".format(arg))
pi.stop() # Disconnect from Pi.
赤外線受信のスクリプト実行
では早速赤外線の受信を実行していこう。
super userにしておく。
pi@raspberrypi:~ $ sudo su
pi@raspberrypi:~ $ python ダウンロード/irrp/irrp.py -r -g17 -f ac_controller AC_cooling:on --no-confirm --post 100
Recording
Press key for 'AC_cooling:on'
press key for 'xx'と聞かれたら、赤外線リモコン受信モジュールに向かってリモコンのボタンを押す。
受信できた場合、以下のように表示される。
※ラズパイに刺すピンが一つづつずれていて初めはうんともすんとも言わなかった……暑さで頭がおかしくなる前に冷房を聞かせることが急務である。
Okay
内容を確認する。登録された内容はirrp.pyと同じディレクトリ内に作成されている。
pi@raspberrypi:~ $ cat ダウンロード/irrp/ac_controller
{"AC_cooling:on": [3788, 1890, 445, 551, 445, 1470, 445, 551, 445, 1470, 380, 551, 445, 1470, 445, 551, 445, 1470, 445, 551, 445, 1470, 445, 551, 380, 1470, 445, 1470, 445, 551, 380, 1470, 445, 551, 445, 1470, 445, 1470, 380, 1470, 380, 1470, 380, 551, 380, 551, 380, 1470, 445, 1470, 445, 551, 445, 551, 445, 551, 380, 551, 380, 1470, 380, 551, 380, 551, 445, 551, 380, 551, 380, 1470, 380, 551, 380, 1470, 380, 551, 380, 551, 380, 551, 380, 551, 380, 1470, 380, 551, 380, 551, 380, 551, 380, 1470, 445, 551, 380, 551, 380, 551, 380, 551, 445, 1470, 380, 551, 380, 551, 380, 551, 380, 1470, 380, 551, 380, 551, 380, 551, 380, 551, 380, 1470, 380, 551, 380, 1470, 380, 551, 380, 551, 380, 551, 380, 551, 380, 551, 380, 551, 380, 1470, 445, 1470, 380, 551, 380, 551, 380, 551, 380, 551, 380, 551, 380, 551, 380, 551, 380, 551, 380, 1470, 380, 551, 380, 1470, 445, 1470, 380, 551, 380, 551, 380, 1470, 380, 551, 380, 551, 380, 551, 380, 551, 380, 551, 380, 551, 380, 1470, 445, 1470, 380, 551, 380, 1470, 380, 1470, 380, 1470, 380, 1470, 380, 551, 380, 551, 380, 551, 380, 1470, 445, 1470, 445, 551, 445, 1470, 445]}
中身の数字はさっぱり意味不明だが、どうやら自宅のエアコンのリモコンの冷房ボタンから出てきた赤外線らしい。
列挙すると一気に登録ができるので同じようにどんどん登録する。
pi@raspberrypi:~ $ python ダウンロード/irrp/irrp.py -r -g17 -f ac_controller AC_heating:on AC:off AC:raise AC:lower --no-confirm --post 100
Recording
Press key for 'AC_heating:on'
Okay
Press key for 'AC:off'
Okay
Press key for 'AC:raise'
Okay
Press key for 'AC:lower'
Okay
どうでもいいけれど、エアコンの冷房のスイッチと暖房のスイッチの赤外線は結構似ている。
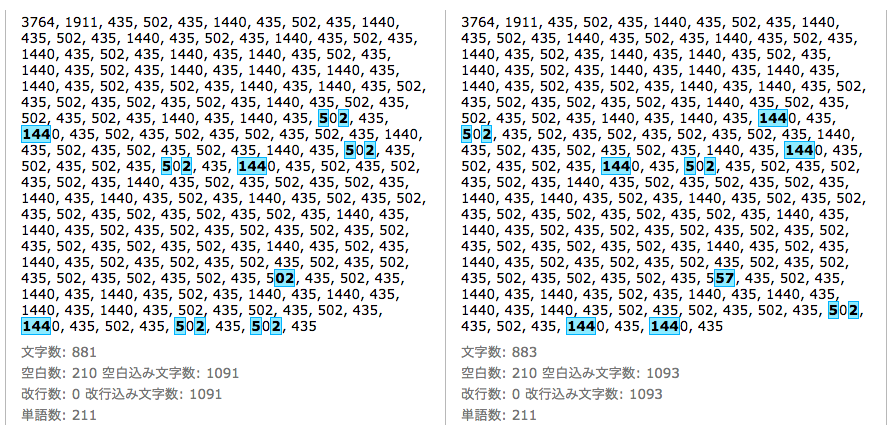
左が冷房。右が暖房。
まとめ
エアコンのリモコンのあらゆるボタンを登録していき、それを発信することができれば、リモコンの代替となるわけである。
次回はこれを送信して、エアコンをつけてみたい。